
賴婉婷/國立臺灣博物館研究組
歐陽盛菊/國立清華大學工業工程與工程管理研究所碩士
歐陽盛芝/國立臺灣博物館
新一代具認知功能的六足自動機器人「HECTOR」(HExapod Cognitive au Tonomously Operating Robot)2015年3月正式對外發表,體長約90公分,重12公斤,能夠背負接近體重三倍約30公斤貨物行動。這款模擬印度紅腳竹節蟲(Carausius morosus)的仿生機器人,獨特的身體架構使其具有靈活的自由度能自行走動,成功跨越階梯、走過碎石地、跨越崎嶇地形,特殊運動控制系統設計僅運動功能協調(Walknet & Navinet)方面就耗費74萬歐元(2,664萬台幣),但最令人驚豔的是此款機器人具自我意識及認知功能,因為生物智能行為的一個重要特性便是能夠想像、預先規劃,儘管HECTOR智力還遠不如模仿的目標昆蟲,但卻已表現出最簡單的智能行為,能處理複雜的感應器數據以協調足部的運動,前進時能自由選擇適合的步法,以適應路況多變的地面環境,可獨立行走並克服障礙物。
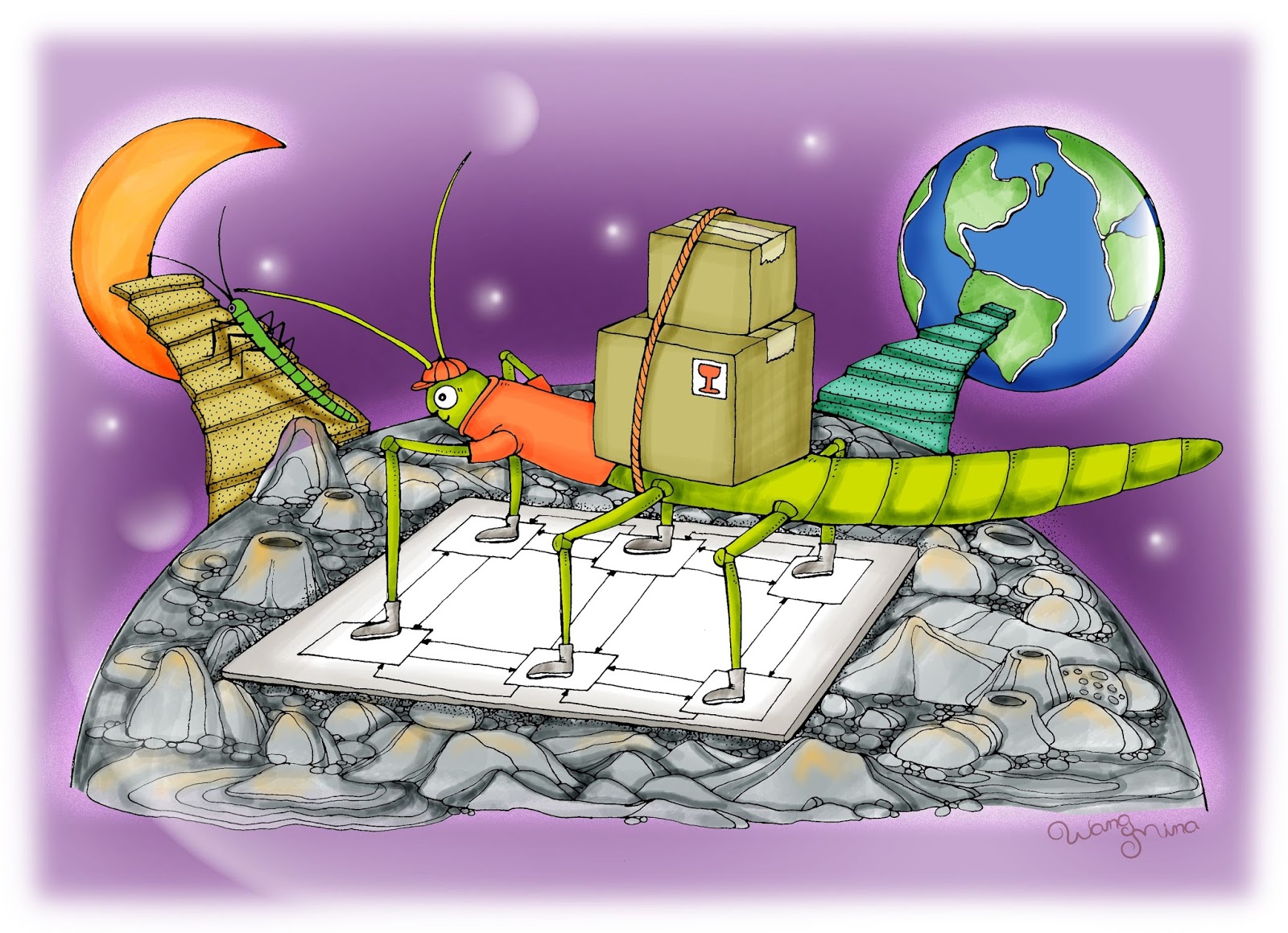 |
| 跨越階梯的仿生竹節蟲機器人「HECTOR」具自我意識及認知功能(繪製者:王美乃)。 |
國畢勒菲德大學「認知互動科技中心」(CITEC, Center of Excellence Cognitive Interaction Technology,
Bielefeld University)的研究團隊包括電腦科學、生物學、材料科學、物理學和工程領域的科學家,他們觀察竹節蟲的行走運動方式,與脊椎動物的呼吸及運動一樣都屬於自主運動,採用超輕的碳纖維強化塑膠(carbon-fiber reinforced plastic, CFRP)製成的HECTOR的六隻機械足即以此為基礎設計,身體分成三段搭配三對足,每隻足具三個合計有18個佈滿感應器的電子關節,方便隨時轉換角度自由活動。此外每一隻足都有採用鋁合金材質製作的單獨驅動器和連接器,配有大量的感應器,是能夠獨立感應與行動的個體,幾乎不需進行訊息交換,能獨立偵測迴轉扭力的大小與施力結果,可以自行決定何時擺動、懸空與停止,如同具有天線與視覺的環境感應器。因此當前方遭遇大型障礙物,揮動的足便能偵測到發生撞擊,主動調節姿勢重新開始,直到攀越障礙物為止。
 |
| 津田氏大頭竹節蟲(Megacrania tsudai)僅分布於墾丁和綠島,是臺灣體型最大的竹節蟲(圖片來源:林士傑)。 |
一般的六足機器人通常會以「〉」形(左前/右中/左後足)與「〈」形(右前/左中/右後足)分兩組配對的方式,以三個支點同時支撐的「三腳架」方式行走,同時必須以事先設定的固定步法前進。HECTOR除三點式行進外,還額外加上演算法,分散控制機制(decentralized control mechanisms)能隨時偵測四周環境,進行目標規劃和路線選定,使機器人能在移動過程中根據地面情況靈活進行調整,能在崎嶇不平的路面持續前進,包括高低起伏的鵝卵石地;若遭遇臺階般有高低差的障礙物時,還會啟用迴避反射機制(evasion reflexes)。
讓HECTOR可以像竹節蟲的步行方式行走的基本軟體控制系統稱為「Walknet」,另一項「Navinet」控制系統,藉由感應器傳回的環境數據,處理後瞭解自己的位置,「思考」解決方案,負責選擇路線,定位導航抵達目標的路徑,使機器人以正確的步法穿過碎石地和上下樓梯。當Walknet及Navinet無法解決問題時,「ReaCog」控制系統就會啟動,使機器人不僅完成自動預定操作,還進一步模擬與執行「想像的行為」,尋找新的解決方案,並評估該動作是否有意義,此為具備「意識」的核心特徵,因此研究團隊主張HECTOR具有自我意識。除了卓越跨越障礙的能力外,HECTOR還具有「可變化」的概念,可以因應不同的研究配備特殊設備,例如可感應遠、近距離應的全方位攝影鏡頭,或可切換為觸覺天線,以探索周圍環境,頭部的相機系統也已經能傳送機器附近的畫面。
研究團隊已在模擬機器觸角,希望能使仿生竹節蟲機器人可以準確感測環境,更靈活自如上下爬行,同時開發和測試新版軟體,希望2017年透過賦予機器人簡單的規劃能力,使之更智能化、更深思考能力。雖然HECTOR最初的研發目的不是救災,但藉由實際模擬昆蟲的運動,已為未來的救災團隊提供新的想法,將有助於開發新類型的自動搜索和營救車輛,在困難地形上運載貨物,甚至幫助太空科學家探索其他星球。
(以上新聞編譯自2016年德國畢勒菲德大學認知互動科技中心發佈之訊息等)
(本文由科技部補助「向大自然借鏡:生物行為的科學解密」執行團隊撰稿)
責任編輯:歐陽盛芝/國立臺灣博物館
審校:歐陽盛芝/國立臺灣博物館
日期:2016/11/17
本單元學術名稱:生物醫農>動物學
標籤:步行至自我意識的仿生竹節蟲機器人「HECTOR」
資料來源:
Paskarbeit, J. and A. Schneider. 2016. HECTOR
Bielefeld University Giant hexapod autonomous robot projects. CITEC, Bielefeld
University (Visit date: 2016/09/23).
Cruse, H. and M. Schilling. 2015. Mental
states as emergent properties: From walking to consciousness. In: Metzinger, T.
and J. M. Windt (Eds.). Open MIND: 9(C). Frankfurt am Main: MIND Group, Germany
( http://dx.doi.org/10.15502/9783958570436).
Garcia-Saura, C. and M. Shanahan. 2015.
Central pattern generators for the control of robotic systems. Independent
Study Option report, Imperial College London (arXiv:1509.02417v1).
延伸學習:
CITEC, Bielefeld University. 2015. A robot prepared
for self-awareness: Expanded software architecture for walking robot Hector. ScienceDaily
/ Science News, March 31, 2015.
Dürr, V. 2014. Stick insect antennae. Scholarpedia, 9(2): 6829 (http://dx.doi.org/10.4249/scholarpedia.6829).
James, M. 2015. Hector the robot stick
insect. I Programmer / News / Robotics, January 4, 2015.
Paskarbeit, J., A. Schneider, M.
Schilling, J. Schmitz. 2011. Designing a multi-legged robot as a
test-bed for motion intelligence mechanisms. CITEC / Research / Projects /
Archive, Bielefeld University (Visit date:
2016/09/29).

沒有留言:
張貼留言
謝謝您喜愛臺博部落格,歡迎您與我們分享。