
歐陽盛菊/國立清華大學工業工程與工程管理研究所碩士
歐陽盛芝/國立臺灣博物館
賴婉婷/國立臺灣博物館研究組
受到切葉蟻(leaf cutter ants)和壁虎的啟發,美國史丹佛大學克高斯基(Mark Cutkosky)教授領導的研究團隊今(2016)年7月發表一款以3D列印組裝的新款仿生微型機器人「μTug」,研發重點在微小力量的協調同步,雖然僅長2.86公分、重17.7公克,但有效荷載力大,當6個μTug團隊合作施力拉動物體時,因為同時施力可減少損耗的交互作用力,且能發揮最大的能量,每個機器人的力量都可達單一作業的6倍,能拉動一輛重達1,800公斤的轎車。新款μTug具有體積小、有效荷載力大、越野性能強和靜音等優點,並且以3D列印組裝,每個成本只需20美元。未來可針對任務要求套用本結果研發的數學模型,根據峰值力(負重)、步法平穩度與所需機器人數量等條件,設計出最佳的仿生微型機器人團隊,或視需求縮小到毫米和微米尺寸。
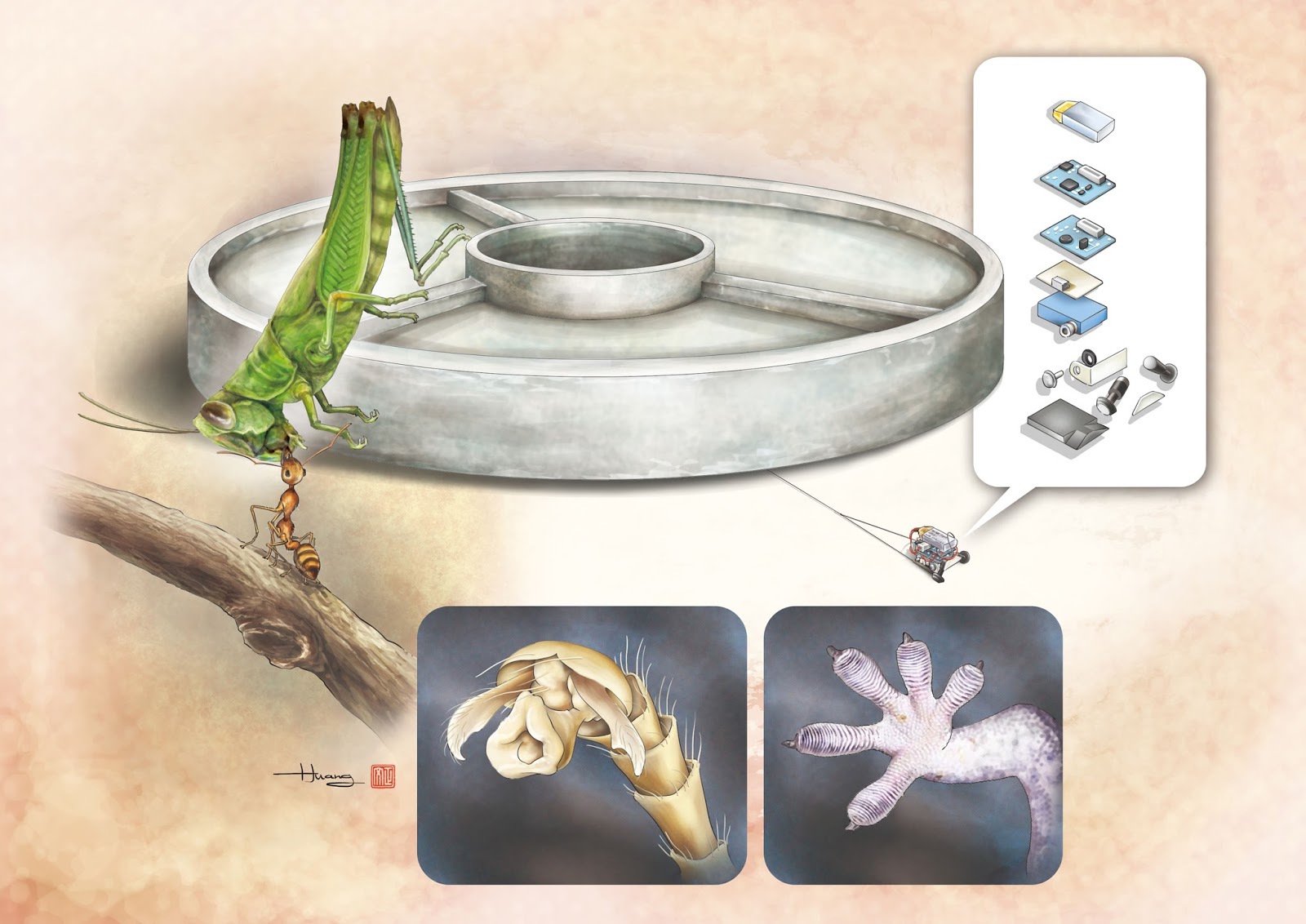 |
| 仿生切葉蟻和壁虎的微型機器人,可團隊合作拉動汽車(繪製者:黃正文)。 |
螞蟻堪稱動物界的大力士,美國哈佛大學昆蟲學家莫費特(Mark W. Moffett)博士以俗稱小紅蟻的多樣擬大頭家蟻(Pheidologeton diversus)為例,工蟻每隻體重0.03-0.04公克,約100隻個體就能以每秒在水平地面移動0.41公分的速度,合作搬運一隻體長10公分重1.92公克的蚯蚓,相當於運送超過5,000倍體重的獵物;如果以人類來計算,如同10個體重70公斤壯漢平均每人搬運350噸,合力搬運重達3,500噸的重物。
 |
| 螞蟻常成群活動,以集體運輸分工合作方式搬運重物回巢(圖片來源:賴景陽)。 |
而分布於美國西南部沙漠的科納盤腹蟻(Aphaenogaster
cockerelli)屬於蟻科(Formicicae)切葉蟻亞科(Myrmicinae),也會透過協調溝通來調整和轉動獵物方向,以集體運輸方式搬運比個體作業更多的重量。牠們足的最末節具有黏附足墊,會分泌凝膠黏附固定,因此當踩到牆面、地面、甚至光滑表面時,透過具有隨意黏附和離開接觸表面的足墊,搬運重物時只要增加足墊與表面的接觸面積,就可以獲得更大的抓地力與牽引力,六足中僅需固定三足就能穩固,其他三足即可往前快速移動,因此負重時不會被壓垮、且行動自如。
研究團隊曾於2015 IEEE國際機器人與自動化大會上展示μTug的原型微型機器人,長、寬、高為2.5Í3.5Í2.5公分,重量13.7公克,形狀類似火柴盒,但因難以模仿蟻足的分泌黏附功能,μTug的足改採壁虎足趾剛毛結構,利用凡得瓦力(van der Waals forces)的乾黏附方式,以矽氧橡膠(silicone
rubber,Dow Corning Sylgard 170)製成長、寬為2.5Í2.5公分、含數百萬個高100μm楔形錐體的人工壁虎足黏片為底座,每次移動步距0.5-2公分,在玻璃表面上能以每秒15公分的速度拉動22.5公斤重的上漆鑄鐵,相當於移動重量為自身體重1,642倍物體。
μTug的底座黏片(足)連結配有橡膠輪的提升臂(lift arms),以最大黏附能力和兩個驅動輪用於移動,透過可捲住有效荷載重物的摩擦離合器作為絞盤,再連接纜線傳輸訊號作為伺服器,然後依序堆疊加裝霍爾效應編碼器(Hall
effect encoder)、處理器、電機驅動器和電池,再外接拖纜線和掛鉤。當驅動輪在拖纜上保持輕微的張力、絞盤解開時,因為拖纜未拉緊、提升臂就會降低,以便μTug移動;當拖運有效負重(重物)時,絞盤會纏繞拉緊拖纜,透過摩擦離合器提起提升臂,黏片就會同時降落下壓黏附接觸表面固定;然後絞盤逆轉、釋放黏片的剪應力、同時解開拖纜,就能降下提升臂和驅動輪,並將黏片從接觸表面提起而往前走,這套循環動作便使μTug能停止或重複相同動作。
研究團隊將新款μTug與其他三款微型機器人同時測試拖拉有效荷載的能力,比較團隊合作效果,第一款脈衝機器人(bristlebot, Hexbug Nano)重7.65公克、長4.39公分,有12隻可在地面抖動的鬃毛腿;第二款是步行款電子金龜蟲(Hexbug Scarab)重78.1公克、長5.48公分,有6隻黏片足可獨立移動;第三款跑步款電子金龜蟲重49公克、長5.48公分。每次依據所得結果,增加各款微型機器人的數量,每組最初用2個,漸增至測試6個(包括步行和跑步款)電子金龜蟲,6個μTug和20個脈衝機器人。
試驗得知脈衝機器人和跑步款電子金龜蟲因足產生的衝力不能同步合作,因此無法有效組合拖拉重物;步行款電子金龜蟲的足與地面保持接觸有更好的牽引力,可同步施力拉動,故組團比單獨表現好;但新款μTug仍屬其中佼佼者,由於足黏片可牢牢黏附接觸表面,獲得相當的反作用力強化同步拉動的力量,6個就能合力以約1分鐘移動12.5公分的速度,在光滑混凝土地面拉動一輛重達1,800公斤的2014年份雪佛蘭轎車,即總重106.2公克(等於0.1062公斤)的6個μTug,單獨施力只能拉動總重122.4公斤的物體,同時合作施力卻可拉動相當於體重的16,949倍的轎車。因此研究團隊依據測試結果,認為爆發力強大的微形機器人個體並不適合團隊體合作,並創建預測機器人團隊可用最大拉力的數學模型,每個μTug可在其單獨的極限操作,以平行並聯方式使團隊的6個機器人拉力超過200 牛頓(Newton,指使質量1公斤物體加速度達1 m/s2時所需的力,簡稱N),經換算得超過4,000個脈衝機器人才能拉動同一輛車。
未來微型機器人大軍可組隊用於搬運重物、移動內部裝置或進行維修、檢查狹小空間內的可疑物品、到危險區域探勘、搬動或營救倖存者、清理災害現場、監控和認識環境、查看輸油管道等設備等,甚至能應用於人體內醫療檢測或手術治療方面。
(以上新聞編譯自2016年2月15日發行之IEEE Robotics and Automation Letters期刊等)
(本文由科技部補助「向大自然借鏡:生物行為的科學解密」執行團隊撰稿)
責任編輯:歐陽盛芝/國立臺灣博物館
審校:歐陽盛芝/國立臺灣博物館
日期:2017/5/18
本單元學術名稱:生物醫農>動物學
標籤:仿生螞蟻(三):團隊合作拉動汽車的微型機器人「μTug」
資料來源:
Christensen, D. L., S. A. Suresh, K. Hahm, and M. R. Cutosky. 2016. Let’s
all pull together: Principles for sharing large loads in microrobot teams. IEEE
Robotics and Automation Letters, 1(2): 1089-1096.
Christensen, D. L., E. W. Hawkes, S. A. Suresh, K. Ladenheim, and M. R.
Cutkosky. 2015. μTugs: Enabling microrobots to deliver macro forces with
controllable adhesives. in 2015 IEEE International Conference on Robotics and
Automation (ICRA), IEEE 2015, 4048-4055.
延伸學習:
Berman, S., Q. Lindsey,
M. S. Sakar, and V. Kumar 2010. Study of group food retrieval by ants as a
model for multi-robot collective transport strategies. Proceedings of Robotics:
Science and Systems, June 2010.
Hawkes, E. W., D. L.
Christensen, M. T. Pope, and M. R. Cutkosky. 2016. One motor, two degrees of
freedom through dynamic response switching. IEEE Robotics and Automation
Letters, 1(2): 969-975.
Hawkes, E. W., D. L. Christensen, and M. R. Cutkosky. 2015. Vertical dry
adhesive climbing with a 100x bodyweight payload. in 2015 IEEE International
Conference on Robotics and Automation (ICRA), IEEE 2015, 3762-2769.
Kube, C. R. and E.
Bonabeau. 2000. Cooperative transport by ants and robots. Robotics and
Autonomous Systems, 30(1-2): 85-101.
Stevens, A. P. 2016. Tiny
microrobots team up and move full-size car. ScienceNews fo Students, April 19,
2016.

沒有留言:
張貼留言
謝謝您喜愛臺博部落格,歡迎您與我們分享。