賴婉婷/國立臺灣博物館研究組
歐陽盛芝/國立臺灣博物館
歐陽盛菊/國立清華大學工業工程與工程管理研究所碩士
一款應用於醫療器械的仿生豬籠草超滑表面塗層「束液全氟化碳化物」(techered-liquid
perfluorocarbon,簡稱TLP),可塗佈在醫療用的管線、導管和器械表面,讓病患減少抗凝劑的使用,有效排斥全血,抵抗血液成分和細菌等微生物的黏附污染,在體外和體內無抗凝劑時均能減少血栓形成,有助於防止醫療器械被血栓阻塞和生物沾黏污染。即使能在垂直玻璃上行走的壁虎,也無法黏附在垂直的TLP塗層壓克力管上。
 |
| 仿生豬籠草塗層TLP可塗佈在醫療管線和器械表面,能有效排斥全血,減少血栓形成阻塞及微生物黏附污染(繪製者:王美乃)。 |
美國哈佛大學因格貝爾(Donald E. Ingber)博士領導的研究團隊2014年在《自然生物技術》(Nature
Biotechnology)期刊發表TLP這項技術,他採用全氟碳化物(perfluorocarbon)為基板,先用化學共價結合柔軟的全氟碳化物薄層或被束縛的全氟碳化物(TP),然後將全氟萘烷(perfluorodecalin,簡稱LP)流動層塗覆在基板表面,使LP和TP組成雙層結構作為TLP塗層表面,可防止纖維蛋白(fibrin)附著、降低血小板黏附及活化形成凝塊,抑制生物膜形成,並讓體外血流穩定。
人類的凝血機制有益於傷口止血,但對有人工關節置換、心臟植入物(例如人工心臟、心室輔助裝置、心律整流去顫器等)和血液透析裝置的病人卻是致命問題,必須搭配使用抗凝血劑,避免血液在這些裝置或管道內凝結阻塞,然而劑量過多時,血小板可能減低而導致流血不止,甚至死亡風險。由於體外循環和留置體內的醫療器械常因形成血栓和生物沾黏污染等造成致命危險,因此迫切需要能排斥血液和抑制生物膜形成的實用塗層。
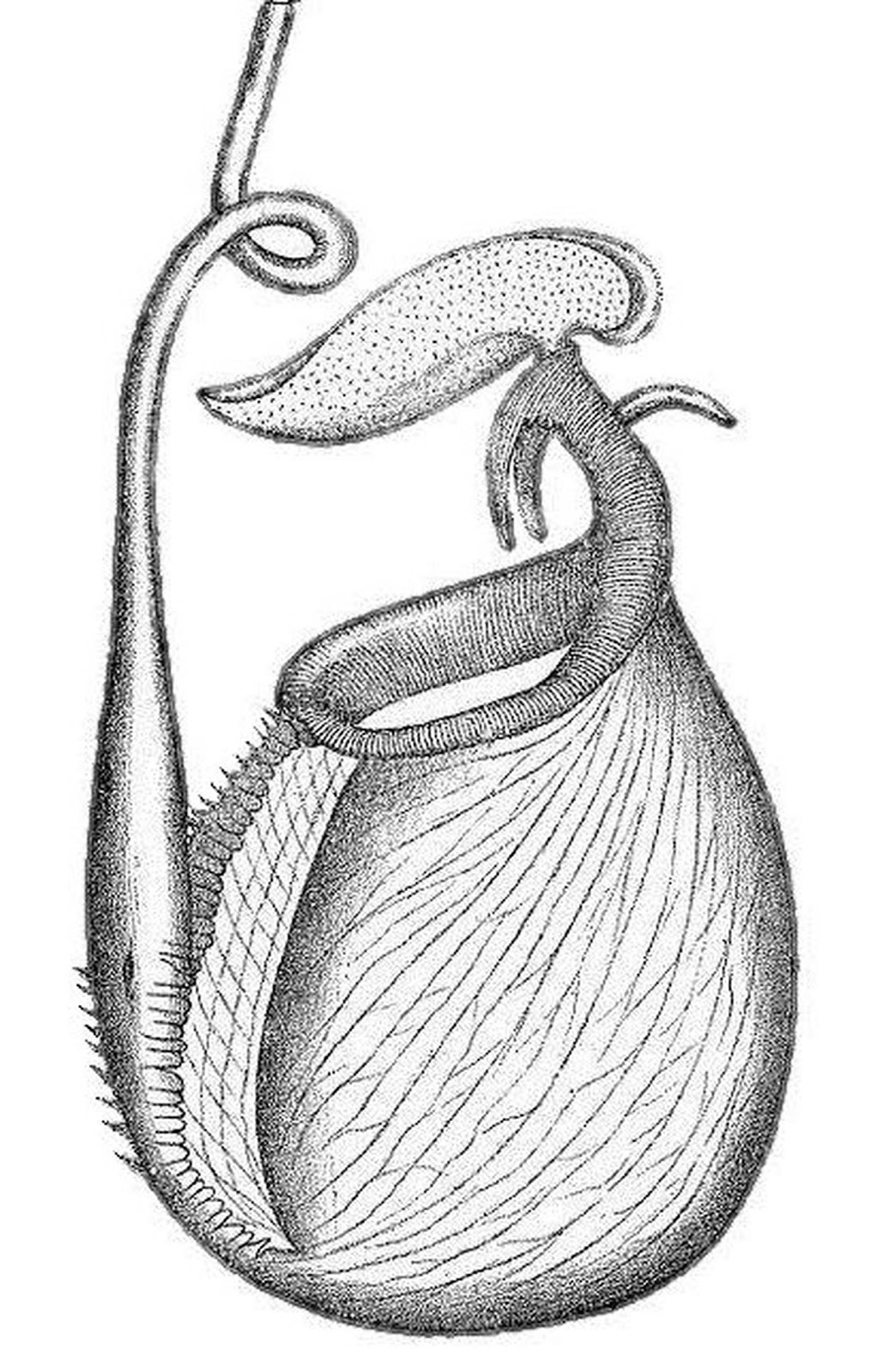 |
| TLP靈感來自仿生二齒豬籠草(Nepenthes bicalcarata)捕蟲籠唇部結構開發的SLIPS(圖片來源:歐陽盛芝)。 |
除了塗佈在體內、外用的醫療管線及管路外,TLP也可應用於其他醫療裝置的表面塗層,例如全人工心臟和心室輔助裝置等體內植入物,和針頭、探針、真空採血管、縫線、血液儲存袋等,以及需要無菌無垢的醫療器械;對於某些需要施用抗血小板劑、抗凝血劑或抗生素藥物植入的病患,使用TLP還可降低用藥量和副作用,大幅降低醫療費用。
TLP的靈感源自2011年哈佛大學艾森貝格(Joanna
Aizenberg)教授團隊模仿二齒豬籠草(Nepenthes
bicalcarata)捕蟲籠唇部,以不沾鍋常用的鐵氟龍當多孔基板,注入當潤滑液的全氟化液體(perfluorinated),加工所製成的人造超滑塗層「注液光滑多孔表面」(slippery liquid-infused porous surfaces,簡稱SLIPS)。因為豬籠草會利用雨水、蜜汁、露水等液體,在捕蟲籠唇部表面形成滑溜的液膜表面,當小型昆蟲或生物被吸引前來取食蜜汁時,唇部的特殊微結構讓牠們極易滑倒而跌落捕蟲籠內被消化。經測試這種天然的液膜表面具有自我潤滑、修復、清潔等功能,在高壓或冰凍等極端環境條件下仍維持性能,還能排斥包括血液、油等任何液體及多種固體。
SLIPS使用多孔、有紋理的表面基板固定潤滑液層,但醫療器械大多是平滑表面,所以TLP改採低壓電漿表面改質技術(low-pressure plasma
surface modification procedure)做為塗覆方式,利用化學改質醫療器械表面的天然粗糙度,幾乎可以應用於任何材料,複雜的幾何形狀也不會改變材料的體積性質,加上處理溫度為攝氏38度,也適用溫度敏感的材料。
TLP塗層可讓血液不會停留在醫療器材表面,將新鮮全血(whole blood)滴在30度角傾斜的TLP塗層壓克力表面,血滴在3秒內立即滑落、且無任何殘留;經測試將活豬植入醫療級管線和導管組裝成動靜脈分流器,可在無抗凝血劑下保持開放至少8小時;在常溫常濕條件下儲放一年後測試,仍能防止導管、管線或透析機中血流引起的凝塊生成。除排斥血纖維蛋白和血小板等許多物質外,細菌等生物亦無法在TLP上面附著,在環狀TLP塗層聚氯乙烯(PolyVinyl
Chloride,簡稱PVC)醫療級管線內培養綠膿桿菌(Pseudomonas
aeruginosa)六週半,僅黏附百萬分之一的細菌,且減少8倍生物膜形成,故TLP確能有效防止生物沾附污染。
(以上新聞編譯自2014年11月12日發行之Nature
Biotechnology雜誌等)
(本文由科技部補助「向大自然借鏡:生物行為的科學解密」執行團隊撰稿)
責任編輯:歐陽盛芝/國立臺灣博物館
審校:歐陽盛芝/國立臺灣博物館
日期:2016/12/15
本單元學術名稱:生物醫農>動物學
標籤:仿生豬籠草塗層TLP可防止血栓和污染
資料來源:
Leslie, D. C., A.
Waterhouse, J. B. Berthet, T. M. Valentin, A. L. Watters, A. Jain, P. Kim, B.
D. Hatton, A. Nedder, K. Donovan, E. H. Super, C. Howell, C. P. Johnson, T. L.
Vu, D. E. Bolgen, S. Rifai, A. R. Hansen, M. Aizenberg, M. Super, J. Aizenberg,
and D. E. Ingber. 2014. A bioinspired omniphobic surface coating on medical
devices prevents thrombosis and biofouling. Nature Biotechnology, 32(11):
1134-1140 (+ 3pp. Supplementary Information).
Crawford, M. 2015.
Medtech tubing: small, strong & complex. Medical Product Outsourcing /
Features, October 14, 2015.
Shin, S., J. Seo, H. Han,
S. Kang, H. Kim, and T. Lee. 2016. Bio-inspired extreme wetting surfaces for
biomedical applications. Materials, 9(2): 116-1-26.
Wong T.
S., S. H. Kang, S. K. Y. Tang, E. J. Smythe, B. D. Hatton, A. Grinthal, and J.
Aizenberg. 2011.
Bioinspired self-repairing slippery surfaces with pressure-stable
omniphobicity. Nature, 477(7365): 443-447 (+ 17pp. Supplementary Information).
延伸學習:
Leslie, D. C., A.
Waterhouse, J. B. Berthet, T. M. Valentin, A. L. Watters, A. Jain, P. Kim, B.
D. Hatton, A. Nedder, K. Donovan, E. H. Super, C. Howell, C. P. Johnson, T. L.
Vu, D. Bolgen, A. Hansen, M. Aizenberg, M. Super, J. Aizenberg, and D. E.
Ingber. 2014. A bioinspired surface coating that prevents thrombosis and
biofouling. 18th International Conference on Miniaturized Systems for Chemistry
and Life Sciences, October 26-30, 2014, San Antonio, Texas, USA, 93-95.
Wyss Institute for
Biologically Inspired Engineering. 2014. Biocoating prevents blood from
clotting on implantables. Medical Design Technology, October 13, 2014.